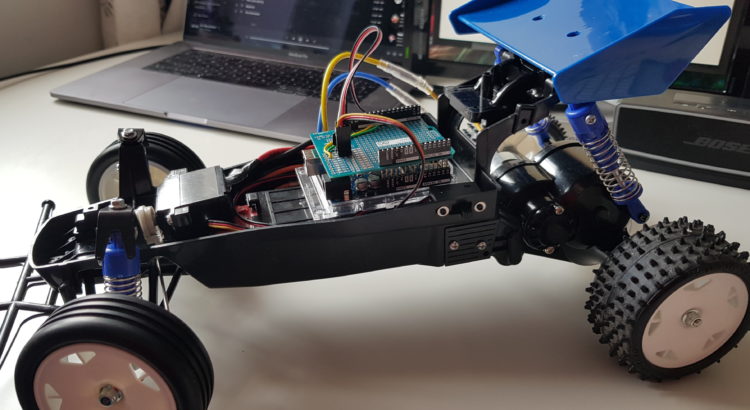
Last time we replaced the standard receiver with a custom coded Arduino. This allowed us to program the car ourselves and run simple automated scripts to turn around in a circle. In this post we’ll enhance our remote control car so it can be driven over WiFi.
The Arduino board we have been using is WiFi ready, due to its secure ECC608 crypto chip accelerator. This is perfect as we can use the readily available Arduino WiFi library in our code.
Read More