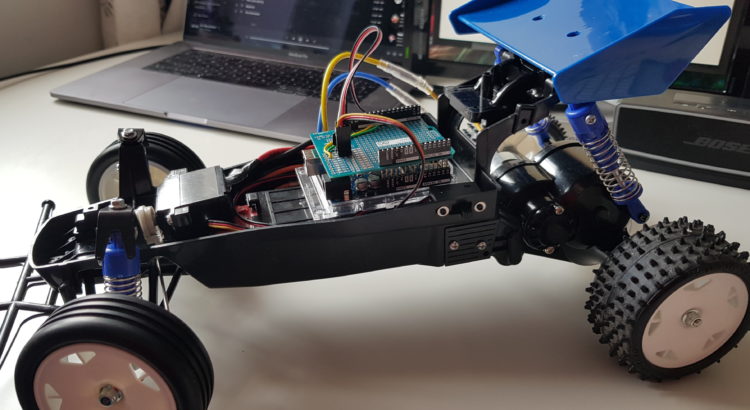
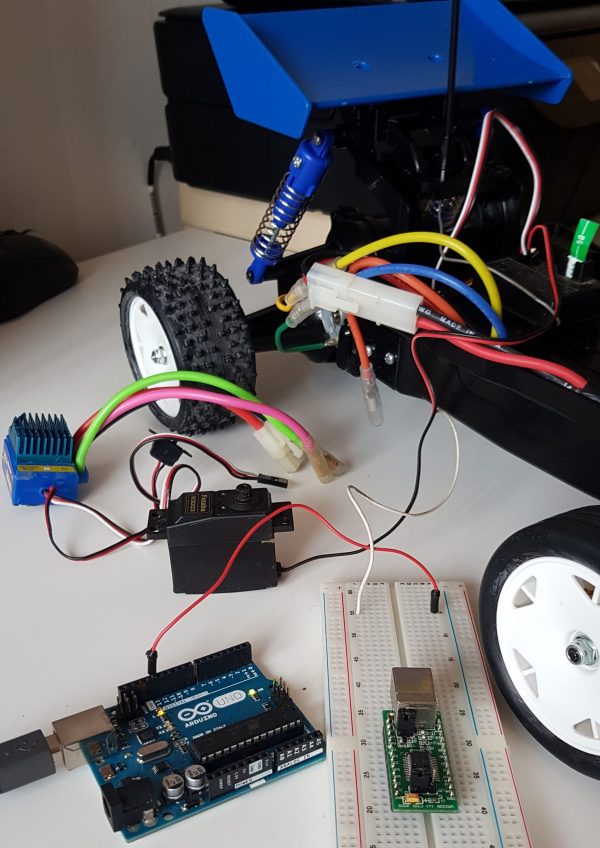
In the previous post the Tamiya RC car was built and we covered the electronic components. This gave us the knowledge required to look at replacing the factory components and control the RC car via code! Now let’s look at adding an Arduino for custom functionality.
Read MoreTag: rc car
Arduino RC Tamiya – Part 1
This is my first blogged side project and it’s quite an exciting / fun one. I hope this set of posts inspires you to get involved and give it a go yourself.
What is this project?
This project is about taking a standard remote control Tamiya and replacing the electronics (in particular the receiver) with an Arduino. This then allows the introduction of custom C / C++ code so we can do anything we want with the RC car! One particular interest I have is to make the RC car remote driveable, via Wifi for example so that friends can drive around my location. Once that works there’s a future step to add a mounted phone to the car with an app that would allow friends to have a telepresence.
Why would you do this?
There’s two reasons for this, the first being that we’re currently stuck in-doors due to Coronavirus (COVID-19) and there’s nothing to do so I need something to keep my creative and constantly logic solving mind at peace. The second is that when I was 11 years old I received and built my first Tamiya, a TL01 and have missed crashing it into things. What better way to get back into that then let a robot drive into things at full speed… Okay I’ll try to avoid that but robotics and programming can create some interesting scenarios.
What’s the plan?
As of writing I’ve already dived head first into this project so firstly I need to update on my progress so far, here goes: